WinAVR Windows 10 Error Compile
January 13, 2017 Leave a comment
Copy this file:
madwizard.org/download/electronics/msys-1.0-vista64.zip
to utils\bin directory (WinAVR)
Sumber: http://www.avrfreaks.net/forum/windows-81-compilation-error?page=all
January 13, 2017 Leave a comment
Copy this file:
madwizard.org/download/electronics/msys-1.0-vista64.zip
to utils\bin directory (WinAVR)
Sumber: http://www.avrfreaks.net/forum/windows-81-compilation-error?page=all
January 9, 2017 Leave a comment
file .c
#include <stdlib.h>
#include <avr/io.h>
#include <avr/pgmspace.h>
#include <util/delay.h>
#include <stdlib.h>
#include "keypad_lib.h"
char read_keypad()
{
DDR_keypad = 0b00001111;
/* 1 2 3
4 5 6
7 8 9
* 0 #
*/
PORT_keypad = 0b11111110;
//scan baris 1
if(PIN_keypad == 0b11101110)
{
return ('1');
}
else if(PIN_keypad == 0b11011110)
{
return ('2');
}
else if(PIN_keypad == 0b10111110)
{
return ('3');
}
//scan baris 2
PORT_keypad = 0b11111101;
if(PIN_keypad == 0b11101101)
{
return ('4');
}
else if(PIN_keypad == 0b11011101)
{
return ('5');
}
else if(PIN_keypad == 0b10111101)
{
return ('6');
}
//scan baris 3
PORT_keypad = 0b11111011;
if(PIN_keypad == 0b11101011)
{
return ('7');
}
else if(PIN_keypad == 0b11011011)
{
return ('8');
}
else if(PIN_keypad == 0b10111011)
{
return ('9');
}
//scan baris 4
PORT_keypad = 0b11110111;
if(PIN_keypad == 0b11100111)
{
return ('*');
}
else if(PIN_keypad == 0b11010111)
{
return ('0');
}
else if(PIN_keypad == 0b10110111)
{
return ('#');
}
return ('$');
}
file .h
#ifndef KEYPAD_LIB_H_ #define KEYPAD_LIB_H_ #include <inttypes.h> #include <avr/pgmspace.h> #define PORT_keypad PORTB #define PIN_keypad PINB #define DDR_keypad DDRB extern char read_keypad(); #endif /* KEYPAD_LIB_H_ */
January 9, 2017 Leave a comment
file .c
#include <avr/io.h>
#include <string.h>
#include <util/delay.h>
#include <compat/twi.h>
#include "i2c_lib.h"
void I2C_Init(void)
{
//set SCL to 400kHz
TWSR = 0x00;
TWBR = 0x0C;
//enable TWI
TWCR = (1<<TWEN);
}
void I2C_Start(void)
{
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN);
while ((TWCR & (1<<TWINT)) == 0);
}
//send stop signal
void I2C_Stop(void)
{
TWCR = (1<<TWINT)|(1<<TWSTO)|(1<<TWEN);
}
void I2C_Write(uint8_t u8data)
{
TWDR = u8data;
TWCR = (1<<TWINT)|(1<<TWEN);
while ((TWCR & (1<<TWINT)) == 0);
}
uint8_t I2C_ReadACK(void)
{
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWEA);
while ((TWCR & (1<<TWINT)) == 0);
return TWDR;
}
//read byte with NACK
uint8_t I2C_ReadNACK(void)
{
TWCR = (1<<TWINT)|(1<<TWEN);
while ((TWCR & (1<<TWINT)) == 0);
return TWDR;
}
uint8_t I2C_GetStatus(void)
{
uint8_t status;
//mask status
status = TWSR & 0xF8;
return status;
}
file .h
#ifndef I2C_LIB_H_ #define I2C_LIB_H_ extern void I2C_Init(void); extern void I2C_Start(void); //send stop signal extern void I2C_Stop(void); extern void I2C_Write(uint8_t u8data); extern uint8_t I2C_ReadACK(void); //read byte with NACK extern uint8_t I2C_ReadNACK(void); extern uint8_t I2C_GetStatus(void); #endif /* I2C_LIB_H_ */
January 9, 2017 Leave a comment
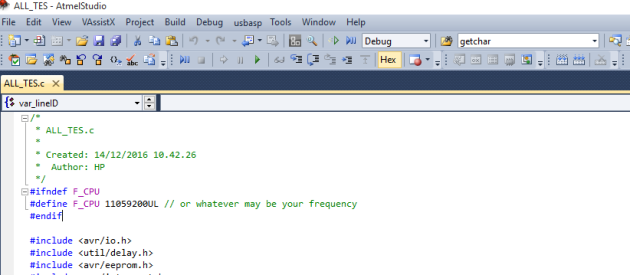
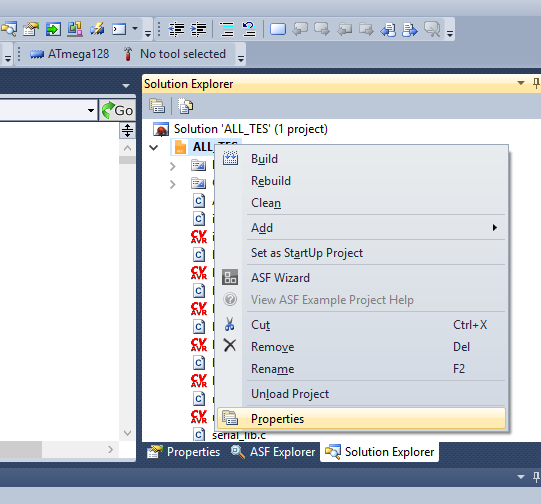
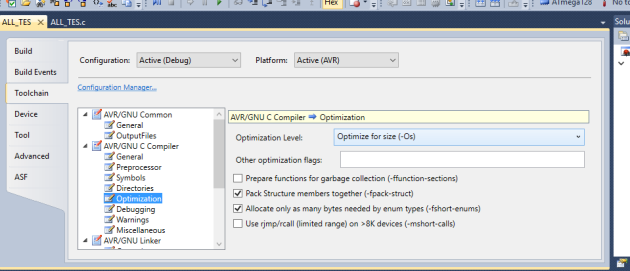
Berikut setting Atmel Studio untuk xtal, float LCD,& Optimization
Tambahkan pada main program
Klik kanan pada Solution Explorer Nama Project -> Properties
Add symbol nilai xtal


Optimization Level jadi -Os
Centang Use vprintf library
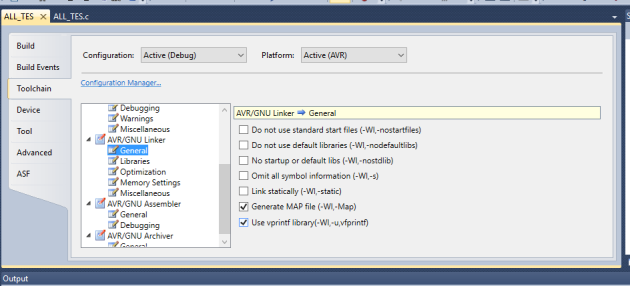
Isi other linker flags

January 9, 2017 Leave a comment
#ifndef F_CPU
#define F_CPU 11059200UL // or whatever may be your frequency
#endif
#include <avr/io.h>
#include <util/delay.h>
#include <avr/eeprom.h>
#include <avr/interrupt.h>
#include <stdlib.h>
#include <stdio.h>
#ifndef UPE
#define UPE 2
#endif
#ifndef DOR
#define DOR 3
#endif
#ifndef FE
#define FE 4
#endif
#ifndef UDRE
#define UDRE 5
#endif
#ifndef RXC
#define RXC 7
#endif
#define FRAMING_ERROR (1<<FE)
#define PARITY_ERROR (1<<UPE)
#define DATA_OVERRUN (1<<DOR)
#define DATA_REGISTER_EMPTY (1<<UDRE)
#define RX_COMPLETE (1<<RXC)
// USART0 Receiver buffer
#define RX_BUFFER_SIZE0 32
char rx_buffer0[RX_BUFFER_SIZE0];
#if RX_BUFFER_SIZE0 <= 256
unsigned char rx_wr_index0,rx_rd_index0,rx_counter0;
#else
unsigned int rx_wr_index0,rx_rd_index0,rx_counter0;
#endif
// This flag is set on USART0 Receiver buffer overflow
uint8_t rx_buffer_overflow0;
// USART0 Receiver interrupt service routine
ISR(USART0_RX_vect)
{
char status,data;
status=UCSR0A;
data=UDR0;
if ((status & (FRAMING_ERROR | PARITY_ERROR | DATA_OVERRUN))==0)
{
rx_buffer0[rx_wr_index0++]=data;
#if RX_BUFFER_SIZE0 == 256
// special case for receiver buffer size=256
if (++rx_counter0 == 0) rx_buffer_overflow0=1;
#else
if (rx_wr_index0 == RX_BUFFER_SIZE0) rx_wr_index0=0;
if (++rx_counter0 == RX_BUFFER_SIZE0)
{
rx_counter0=0;
rx_buffer_overflow0=1;
}
#endif
}
}
#ifndef _DEBUG_TERMINAL_IO_
// Get a character from the USART0 Receiver buffer
#define _ALTERNATE_GETCHAR_
#pragma used+
char _getchar(void)
{
uint8_t counter1 = 0,
counter2 = 0,
counter3 = 0;
char data;
uint8_t cc;
while(rx_counter0==0)
{
_delay_us(0);
};
data=rx_buffer0[rx_rd_index0++];
#if RX_BUFFER_SIZE0 != 256
if (rx_rd_index0 == RX_BUFFER_SIZE0) rx_rd_index0=0;
#endif
cli();
--rx_counter0;
sei();
return data;
}
#pragma used-
#endif
// USART0 Transmitter buffer
#define TX_BUFFER_SIZE0 32
char tx_buffer0[TX_BUFFER_SIZE0];
#if TX_BUFFER_SIZE0 <= 256
unsigned char tx_wr_index0,tx_rd_index0,tx_counter0;
#else
unsigned int tx_wr_index0,tx_rd_index0,tx_counter0;
#endif
// USART0 Transmitter interrupt service routine
ISR(USART0_TX_vect)
{
if (tx_counter0)
{
--tx_counter0;
UDR0=tx_buffer0[tx_rd_index0++];
#if TX_BUFFER_SIZE0 != 256
if (tx_rd_index0 == TX_BUFFER_SIZE0) tx_rd_index0=0;
#endif
}
}
#ifndef _DEBUG_TERMINAL_IO_
// Write a character to the USART0 Transmitter buffer
#define _ALTERNATE_PUTCHAR_
#pragma used+
void _putchar(char c)
{
while (tx_counter0 == TX_BUFFER_SIZE0)
{
_delay_us(0);
};
cli();
if (tx_counter0 || ((UCSR0A & DATA_REGISTER_EMPTY)==0))
{
tx_buffer0[tx_wr_index0++]=c;
#if TX_BUFFER_SIZE0 != 256
if (tx_wr_index0 == TX_BUFFER_SIZE0) tx_wr_index0=0;
#endif
++tx_counter0;
}
else
UDR0=c;
sei();
}
#pragma used-
#endif
// USART1 Receiver buffer
#define RX_BUFFER_SIZE1 32
char rx_buffer1[RX_BUFFER_SIZE1];
#if RX_BUFFER_SIZE1 <= 256
unsigned char rx_wr_index1,rx_rd_index1,rx_counter1;
#else
unsigned int rx_wr_index1,rx_rd_index1,rx_counter1;
#endif
// This flag is set on USART1 Receiver buffer overflow
uint8_t rx_buffer_overflow1;
// USART1 Receiver interrupt service routine
ISR(USART1_RX_vect)
{
char status,data;
status=UCSR1A;
data=UDR1;
if ((status & (FRAMING_ERROR | PARITY_ERROR | DATA_OVERRUN))==0)
{
rx_buffer1[rx_wr_index1++]=data;
#if RX_BUFFER_SIZE1 == 256
// special case for receiver buffer size=256
if (++rx_counter1 == 0) rx_buffer_overflow1=1;
#else
if (rx_wr_index1 == RX_BUFFER_SIZE1) rx_wr_index1=0;
if (++rx_counter1 == RX_BUFFER_SIZE1)
{
rx_counter1=0;
rx_buffer_overflow1=1;
}
#endif
}
}
// Get a character from the USART1 Receiver buffer
#pragma used+
char _getchar1(void)
{
uint8_t counter1 = 0,
counter2 = 0,
counter3 = 0;
char data;
while (rx_counter1==0)
{
_delay_us(0);
};
data=rx_buffer1[rx_rd_index1++];
#if RX_BUFFER_SIZE1 != 256
if (rx_rd_index1 == RX_BUFFER_SIZE1) rx_rd_index1=0;
#endif
cli();
--rx_counter1;
sei();
return data;
}
#pragma used-
// USART1 Transmitter buffer
#define TX_BUFFER_SIZE1 32
char tx_buffer1[TX_BUFFER_SIZE1];
#if TX_BUFFER_SIZE1 <= 256
unsigned char tx_wr_index1,tx_rd_index1,tx_counter1;
#else
unsigned int tx_wr_index1,tx_rd_index1,tx_counter1;
#endif
// USART1 Transmitter interrupt service routine
ISR(USART1_TX_vect)
{
if (tx_counter1)
{
--tx_counter1;
UDR1=tx_buffer1[tx_rd_index1++];
#if TX_BUFFER_SIZE1 != 256
if (tx_rd_index1 == TX_BUFFER_SIZE1) tx_rd_index1=0;
#endif
}
}
// Write a character to the USART1 Transmitter buffer
#pragma used+
void _putchar1(char c)
{
while (tx_counter1 == TX_BUFFER_SIZE1)
{
_delay_us(0);
};
cli();
if (tx_counter1 || ((UCSR1A & DATA_REGISTER_EMPTY)==0))
{
tx_buffer1[tx_wr_index1++]=c;
#if TX_BUFFER_SIZE1 != 256
if (tx_wr_index1 == TX_BUFFER_SIZE1) tx_wr_index1=0;
#endif
++tx_counter1;
}
else
UDR1=c;
sei();
}
#pragma used-
main program
int main(void)
{
char buffer = 0;
// USART0 initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity
// USART0 Receiver: On
// USART0 Transmitter: On
// USART0 Mode: Asynchronous
// USART0 Baud Rate: 9600
UCSR0A=0x00;
UCSR0B=0xD8;
UCSR0C=0x06;
UBRR0H=0x00;
UBRR0L=0x47;
// USART1 initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity
// USART1 Receiver: On
// USART1 Transmitter: On
// USART1 Mode: Asynchronous
// USART1 Baud Rate: 9600
UCSR1A=0x00;
UCSR1B=0xD8;
UCSR1C=0x06;
UBRR1H=0x00;
UBRR1L=0x47;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
sei();
while(1)
{
//TODO:: Please write your application code
buffer = _getchar();
_putchar(buffer);
}
}

